Tematów technicznych ostatnio u nas dość mało i składa się na to kilka powodów. Czasem brakuje kompetencji by zabrać się za omawianie zaawansowanego tematu, czasem brakuje interesujących technicznych tematów… a czasem z chęci przedstawienia pewnej ciekawostki wychodzi bardziej product placement niż rzetelny artykuł. Niemniej jednak ta ciekawostka jest na tyle interesująca, że postanowiliśmy podjąć się jej przedstawienia.
W minioną niedzielę (1 lipca) w programie TechWeek Kuby Klawitera pojawiła się krótka informacja dotycząca prototypu latającego drona ratowniczego. Klawiter w 40 sekund przedstawia dość humorystycznie (jak na formułę działalności przystało) zasadność powstania drona i fakt, że bardziej przypomina konika morskiego niżeli okrzykniętego nazwą przez twórców drona smoka. To jednak za mało jak na nasze potrzeby, dlatego zgłębiamy temat dalej.
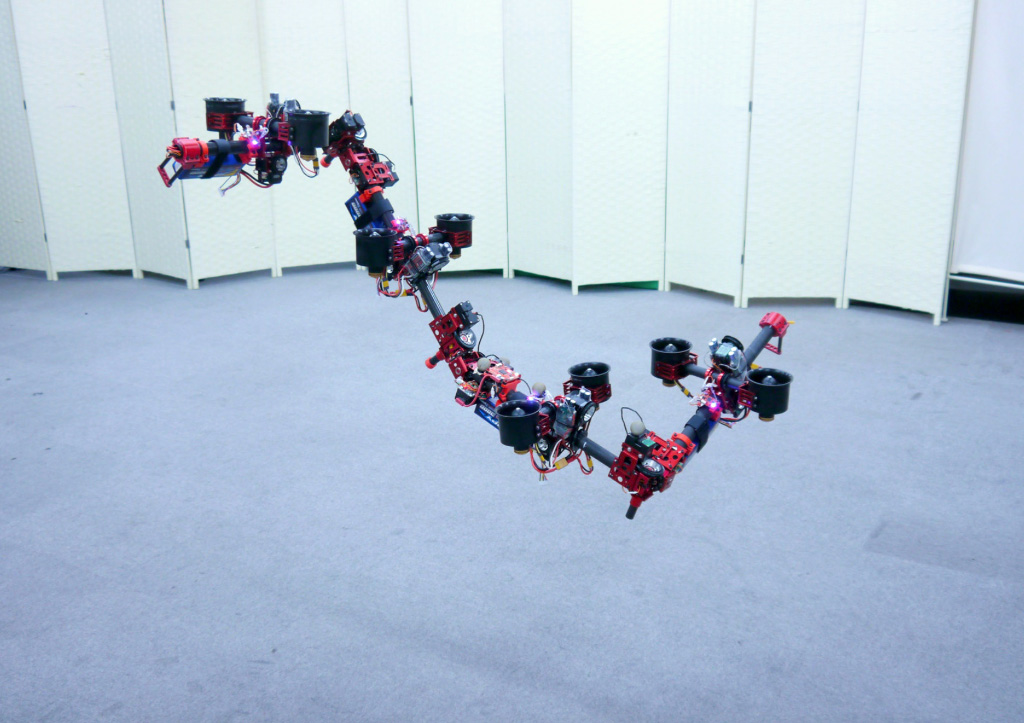
Czym jest dron DRAGON? To dwuśmigłowy, wielomodułowy robot posiadający zdolność wielopoziomowego i swobodnego przekształcania ustawień modułów w locie. Projektantami urządzenia są Moju Zhao, Tomoki Anzai, Fan Shi, Xiangyu Chen, Kei Okada i Masayuki Inaba z Uniwersytetu Tokijskiego. Tōdai to bardzo prestiżowa, wiodąca w Azji uczelnia kształcąca spory procent przyszłych laureatów nagrody Nobbla. Jest to więc swoista gwarancja na powodzenie omawianego projektu. Projekt został zaprezentowany na Międzynarodowej Konferencji Robotyki i Automatyki ICRA 2018 w Brisbane, Australia. Informacja o projekcie natomiast wyszła na jaw dzięki działalności medialnej IEEE – Instytutu Inżynierów Elektryków i Elektroników.
Video przedstawiające działanie projektu:
https://www.youtube.com/watch?time_continue=84&v=zMi5v2KznU4
W wielkim skrócie DRAGON jest w stanie samodzielnie zadecydować – kiedy i jak zmieniać swój wygląd umożliwiający przeciskanie się między szczelinami lub materiałami. W zależności od konstrukcji i indywidualnego zamówienia może od dwóch do dwunastu modułów, z których każdy posiada dwa wirniki zdolne do zmiany kierunku lotu lub ustawienia w dowolnym momencie pracy urządzenia. Poza modułami wirnikowymi Dragon zawiera moduł-rdzeń, który skupia cały system zasilająco-sterujący. Dragon sterowany jest za pośrednictwem znanego robotykom systemu Euclid od Intela. Całość konstrukcji napędzana jest akumulatorami ułożonymi wzdłuż „kręgosłupa” robota, a czas pracy ciągłej oscyluje w okolicach 3 minut. Dragon to jednak nie tylko wiewlowektorowy lot. To także zdolność do unoszenia obiektów w różnej formie. Może on posiadać chwytak ramieniowy lub.. opasać podnoszony obiekt!
Nie wiadomo – czy i kiedy robot wejdzie do seryjnej produkcji. Nie znamy też dokładnych parametrów, jak choćby maksymalny udźwig robota. Sam IEEE potraktował projekt nieco po macoszemu obrazując jego zastosowanie jako zabawki użytku domowego. Zostały już jednak ogłoszone pomysły na realizację projektu w masowej produkcji jako robota ratowniczo-poszukiwawczego. W świetle częstych katastrof budowlanych Japonii i trzęsień ziemi – bardzo prawdopodobne jest że naukowcy z Tokio będą precyzować swój wynalazek właśnie pod kątem ratownictwa. Skupiając się na polskich warunkach eksploatacyjnych można zadać sobie kilka pytań. Czy 3 minuty to czas pozwalający na wydajne użycie robota w gruzowiskach i kopalniach? Czy polskie służby ratownicze będzie stać na zakup powyższego sprzętu i eksploatację w ryzykownym terenie? Czy Dragon będzie miał szansę kiedyś przyczynić się do uratowania człowieka? Na te i inne wieści trzeba będzie poczekać, niemniej jednak jedno jest pewne – jeśli projekt wejdzie w etap masowej produkcji – będzie sporym krokiem technologicznym w dziedzinie ratownictwa.